
起因是这样的,前段时间,我同时开始玩履带车和固定翼航模。履带车的动力是直流电机加驱动板,PWM 调制,0-100% 占空比控制电机从静止到全速转动。
航模的话,虽说十年前我就开始接触了,但一直都是浮于表面的玩,能动就行。玩航模必须要有遥控器和接收机,接收机也是输出 PWM 信号的,连接舵机就能控制其在指定角度范围内运动,连接电调就能控制电机转速。
于是,我想当然的,航模接收机 应该也是输出 0-100% 占空比的 PWM 信号,0 就是舵机一个极限角度,50% 就是中位,100% 就是另一个极限角度。
然而事实并不是,我把履带车的驱动板接上航模的接收机,不管我怎么推拉摇杆,履带车始终以一个非常低的速度运动。
这就引起了我的好奇。
先简单看下航模接收机的 PWM 信号图形
手头没有示波器,就拿一个简单的逻辑分析仪应付一下:
我只测量 1 通道数据(通常是副翼/横滚通道)。
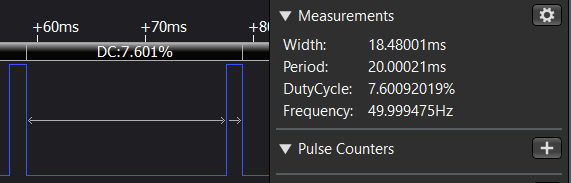
这是摇杆在中点:
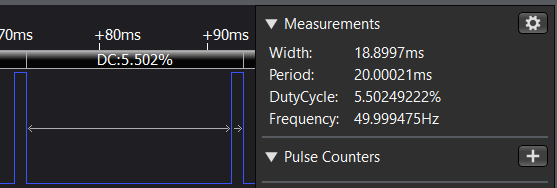
摇杆在最左侧:
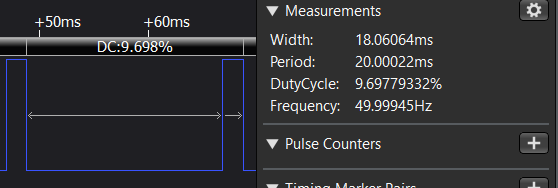
摇杆在最右侧:
真有趣,占空比始终在 5%~10% 左右。说明航模遥控器的 PWM 信号肯定不是简单靠占空比来控制舵机的。不然放着 10%-100% 这么大的空间不用,有点暴殄天物。
航模 PWM 信号的真实解释
我查了很多论坛,一开始感觉很奇怪,他们(比如 这个 )基本上只谈 PWM 的脉冲时间长度为 1-2ms,以及频率“一般”为 50Hz,却几乎不谈占空比。
我看了一会突然醒悟了,因为 PWM 不是本来就叫“脉冲宽度调制”吗?只不过以前我都用它来调光、控制电机,所以才关注占空比,但 PWM 本身应该去关注“宽度”啊。
所以,就像 这里 回答的一样,航模舵机本身并不关注占空比是多少,只关注每个周期内,高电平的时间是多长。1ms 就代表最小角度,2ms 就是最大角度,1.5ms 就是中位。
因为一般频率是 50Hz,也就是周期为 20ms,所以占空比看起来才是 5%-10%。
更多的解释
至于为什么选择 50Hz,解释是:这个频率是舵机的工作频率而已,舵机要按照这个周期动作。太快舵机会吃不消,太慢的话,响应就慢了。
也有 200Hz 的舵机,但脉冲宽度也是 1-2ms,于是占空比就变成了 20%-40%。
当然也有部分舵机会用 0.5-1ms 以及 2-2.5ms 这个区间的脉冲宽度,以达到更大的舵量。
而对于电调而言,信号也是一样的,沿用舵机的信号就很方便。
另外为什么选择 1-2ms?因为很久以前的遥控器就这么规定了,不多说。